Can Kocabalkanli
Welcome to my website! Here you can find out about my current pursuits and skills, as well as projects past and present. Keep scrolling to see more.
: cankocabalkanli (at) gmail.com
Education
Johns Hopkins University
Masters of Science in Engineering, Robotics
GPA: 4.00/4.00 Exp. May 2020
Bachelor of Science, Mechanical Engineering
Minor in Robotics, Mathematics
General & Departmental Honors
GPA: 3.70/4.00 May 2019
Dean's List every semester except Fall 2017.

Technical Skills
Software & Languages
Programming Languages: C++, Java, Python, MATLAB, Wolfram, Arduino
Software: SolidWorks, Pro/E, Mathematica, ROS, COMSOL, ANSYS
Languages: Turkish, English, (Intermediate) Spanish
Skills & Algorithms
• SLAM, motion planning
• (Extended) Kalman Filter
• Robot dynamics, kinematics,
control, and error propagation
• Mechatronic system design
and implementation, electronics
• Hardware/software integration
• Computer vision & image processing with Fast Fourier Transform
• Machine shop tools, laser
cutting, 3D printing
• Technical writing, documentation, presentation
Patents Applied For
• Smart Fretboard For Training & Therapy• Mosquito Staging Apparatus for Vaccine Production
Course Work & Projects
• Robot Device Kinematics, Dynamics, & Control
• Algorithms for Sensor Based Robotics
• Computer Integrated Surgery I & II
• Fast Fourier Transform in Graphics & Vision
• Computer Vision
• Kinematics
• Haptic Interface Design for Human-Robot Int.
• Dynamics of Robots & Spacecraft

Engineering Projects
Projects here include a force-sensing guitar for training and therapy,
a mosquito staging apparatus to make malaria vaccine, and
a program to make an android imitate human gestures
Click on an image for project details.
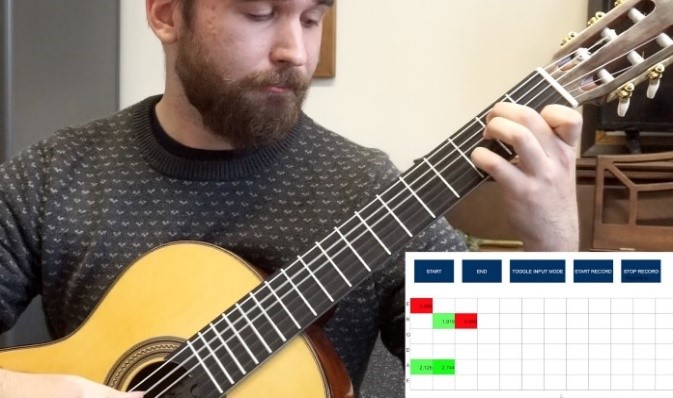

Smart Guitar for Training and Therapy
Objective: Develop technology capable of measuring the dynamic normal forces applied by musicians’ fingers when playing the classical guitar so that:
1. Musicians who’ve sustained hand injury can track their recovery as part of physical therapy.
2. Musicians can train and develop safer playing habits using the real time force feedback.
3. Researchers can distinguish novice and expert players and learn about what kind of playing pattern is most effective and injury-free.


Achievements:
• Our project was awarded 2019 Best Senior Design Project by a committee of 13 ASME judges.
• A paper about the project was accepted and will be presented
in IEEE Sensors Conference 2019 in Montreal.
• In the process of filing a patent.
What I did:
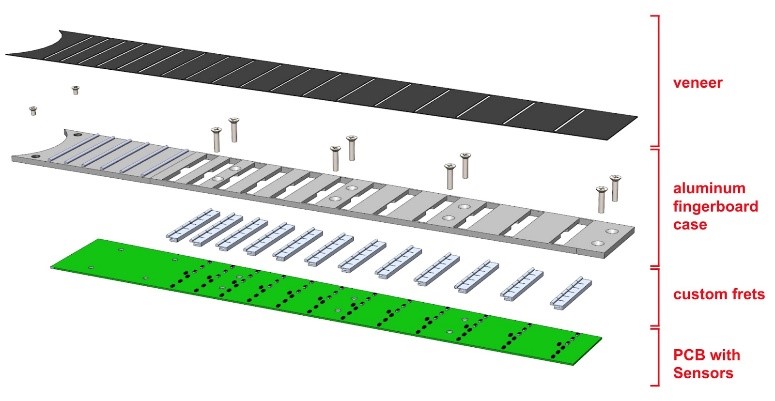
1. Designed, dimensioned, and prototyped custom frets and an aluminum fingerboard case to house frets and electronics using Solidworks. Produced CAD models and engineering drawings.
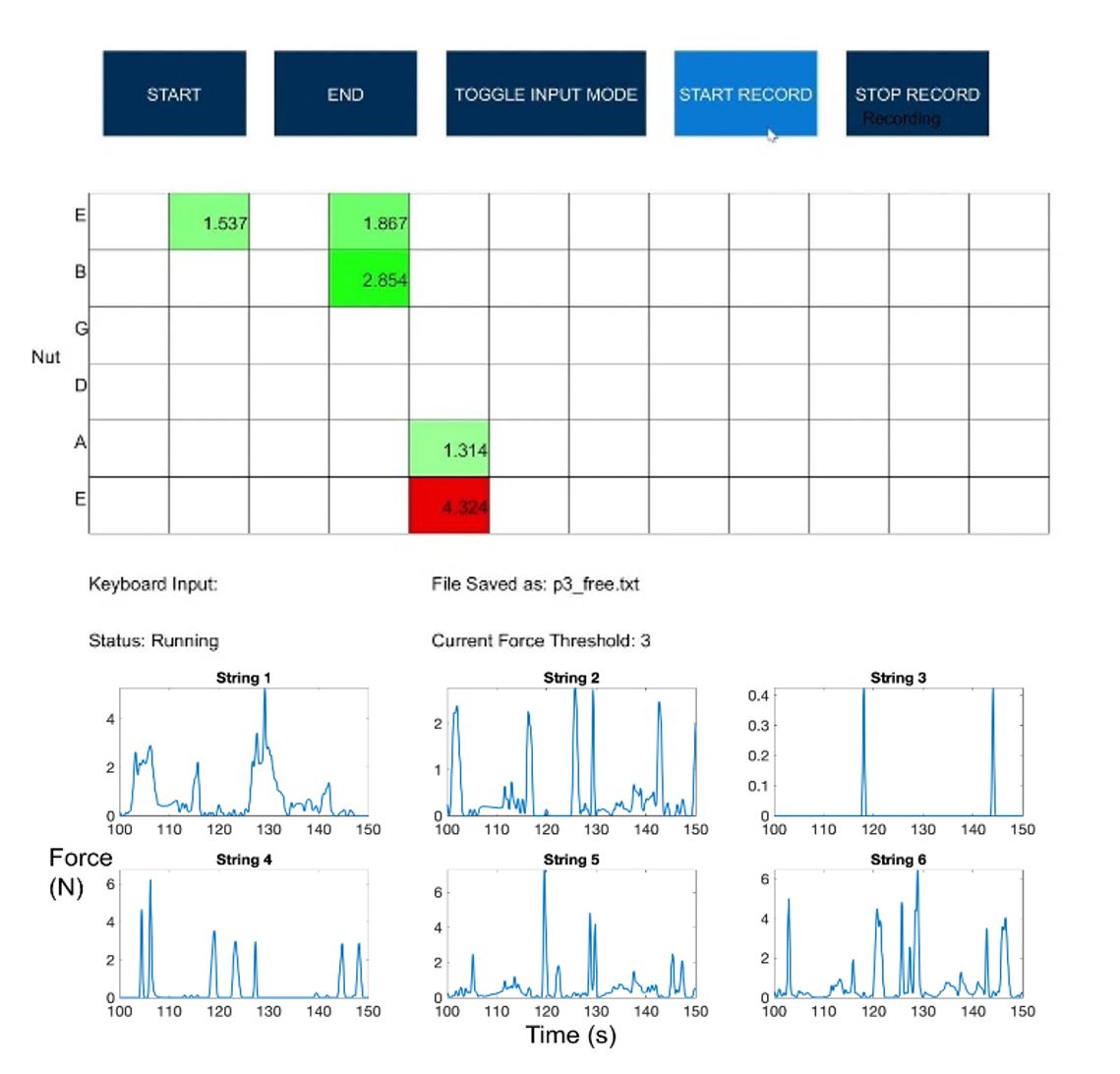
2. Designed and programmed Graphical User Interface in Processing to receive serial data from the fretboard to visualize measured forces using a color gradient and log measurements.
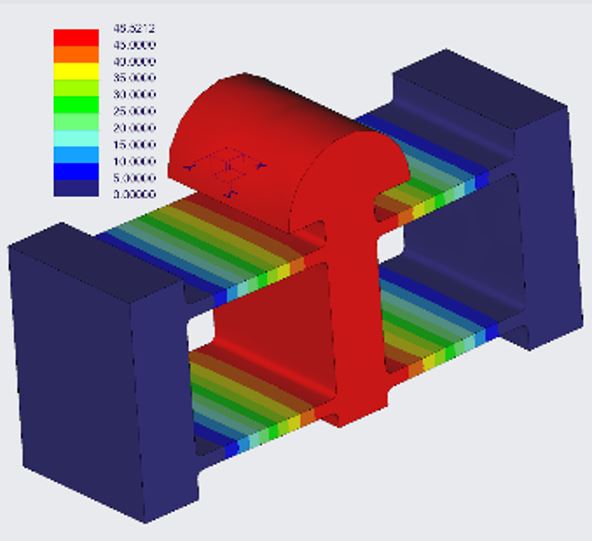
3. Ran Finite Element Analysis in Solidworks and Pro/E to analyze deflection and stress in frets.
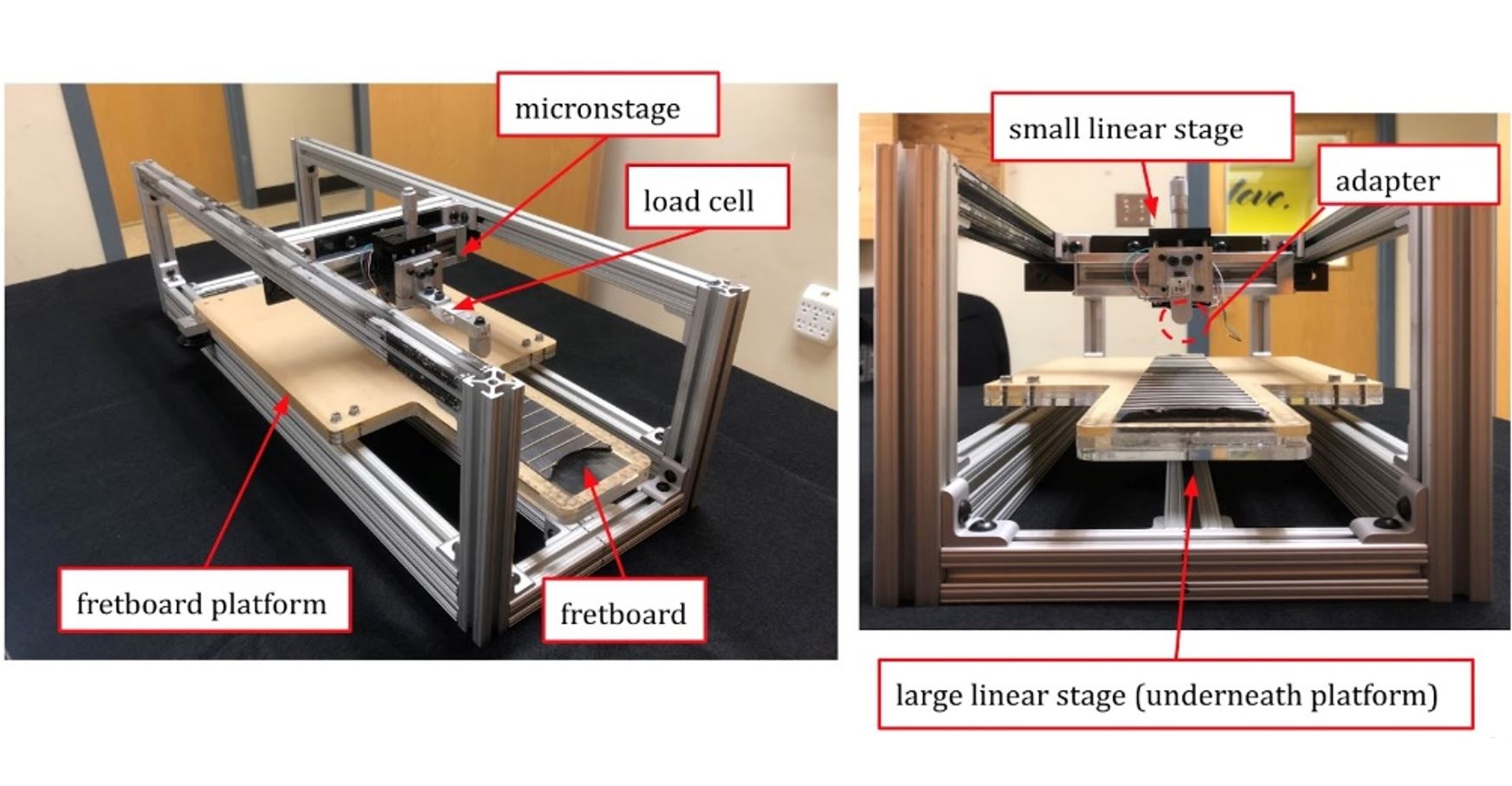
4. Designed and implemented testing-calibration rig and testing procedure for the sensing-fingerboard, using components I machined, laser-cut and 3D-Printed.
5. Assembled system components together and mounted on a Cordoba guitar with machine shop tools.
6. Calibrated and validated sensing-fingerboard using a load cell and microprocessor.


7. Designed and ran experiments to asses sensing technology’s dependence on ambient temperature. Designed, implemented, and tested a temperature compensation system to solve the sensor’s temperature dependence.
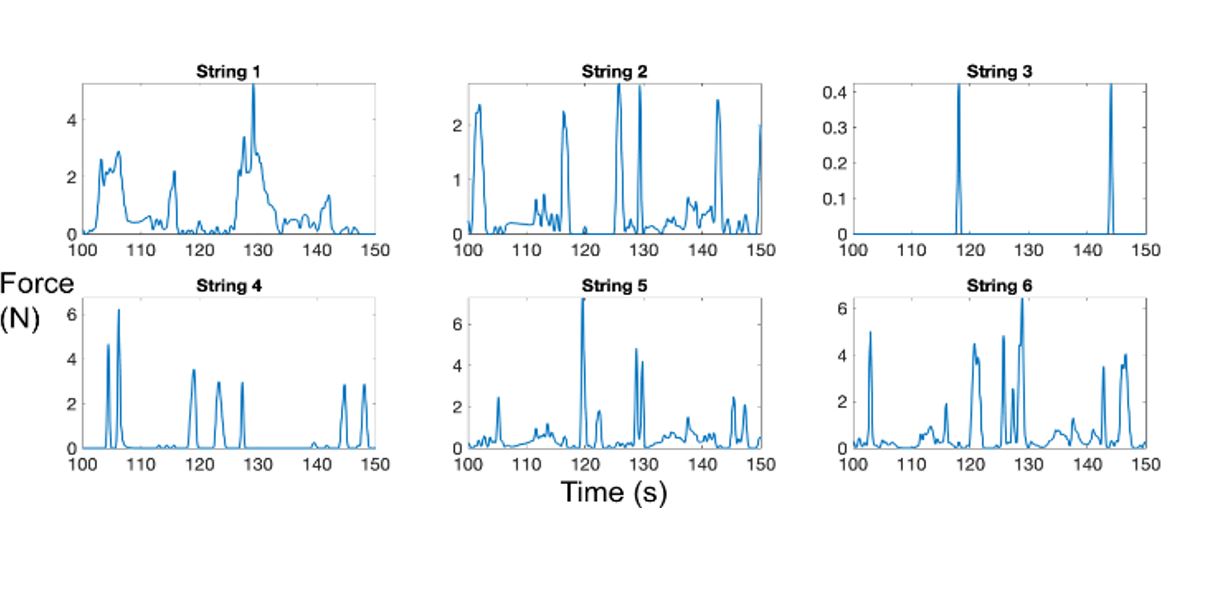
8. Conducted and documented user experiments with an IRB protocol on guitar players using GUI. Processed measured force on each string over time in MATLAB.
9. Served as the team’s financier; budgeting, tracking, and making financial decisions on parts and services purchased.

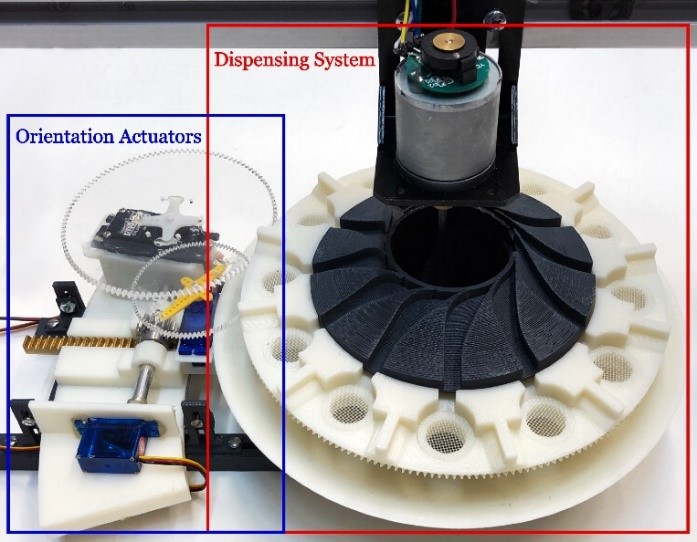
Mosquito Staging Apparatus for Malaria Vaccines
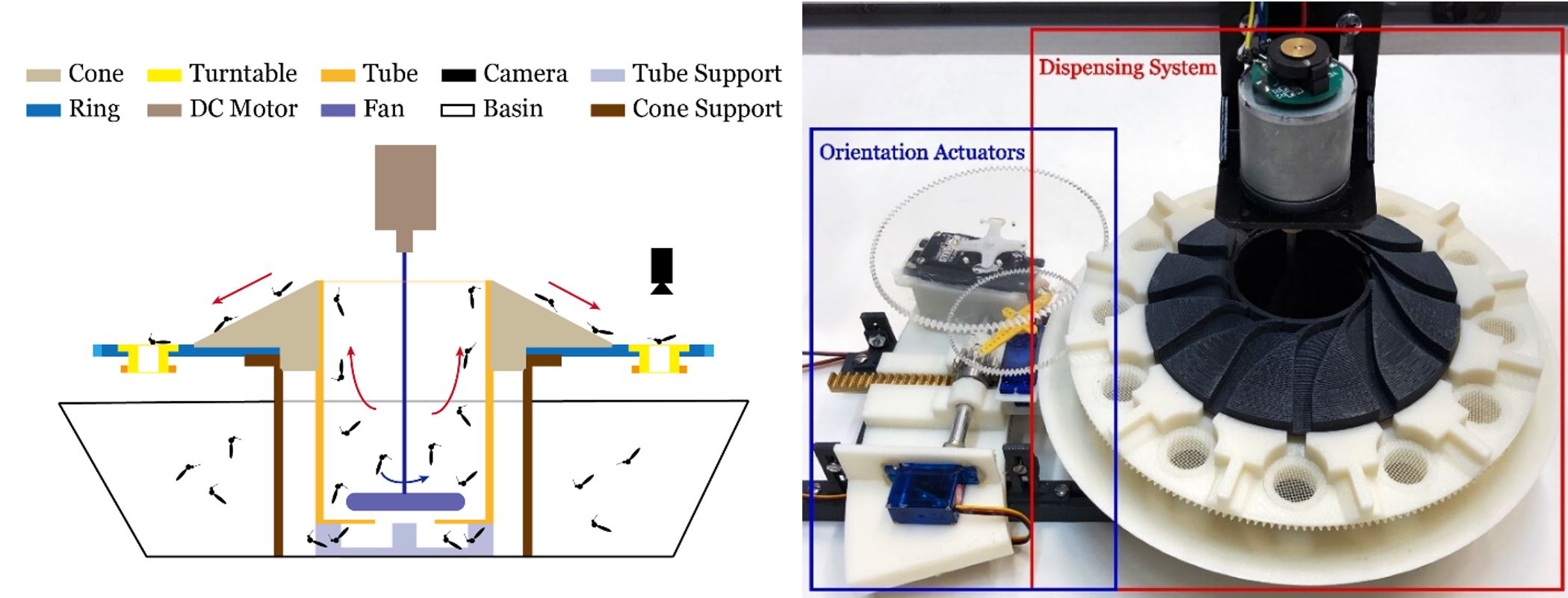
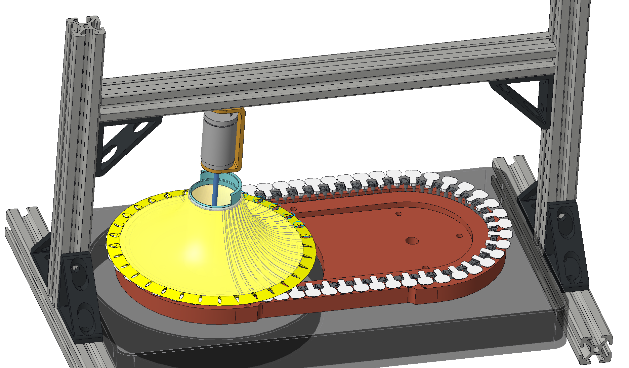
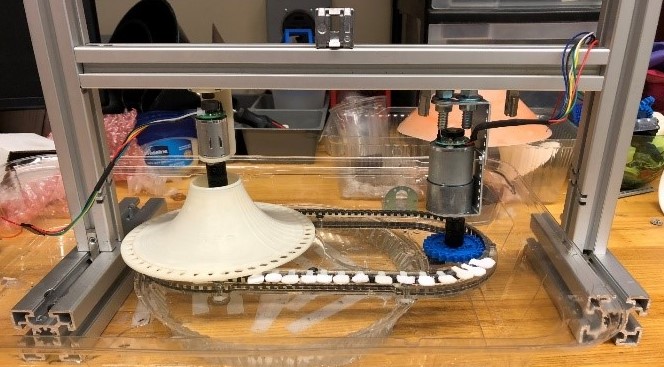
Objective: To create a fully-automated system to extract mosquito glands for malaria vaccines.
Mosquito gland extraction using microdissection consists of four steps: (1) mosquito alignment (2) decapitation (3) gland extrusion and (4) gland collection. I focused on the design of a feeding system to deliver and align mosquitoes, and then some worked on a preliminary assembly to extrude their glands.
Achievements:
• Our paper on the project was accepted and will be presented in the Conference on Automation Science & Engineering 2019 in Vancouver.
• In the process of filing a patent.
What I did:
1. Co-Authored and presented paper in Conference on Automation Science and Engineering (CASE) 2019: Kocabalkanli, Can, et al. ” Mosquito Staging Apparatus for producing PfSPZ Malaria Vaccines,” 2019, Submitted to CASE 2019. U.S. Patent Application
2. Led a team of 4 students to model my designs and ideas we developed together as a team over July-August 2018. Met with them weekly to set objectives, delegate, and plan the implementation and experimentation process.


What I did:
3. Designed staging system components and assemblies in Pro/E and SolidWorks. Implemented design iterations via 3D printed, laser-cut, and off-the-shelf parts.
4. Designed experiments and tested system iterations to assess performance, came up with improvements for each design iteration.
5. Reported and documented weekly deliverables such as prototypes, test results, analysis to multiple cross-functional teams and stakeholders.


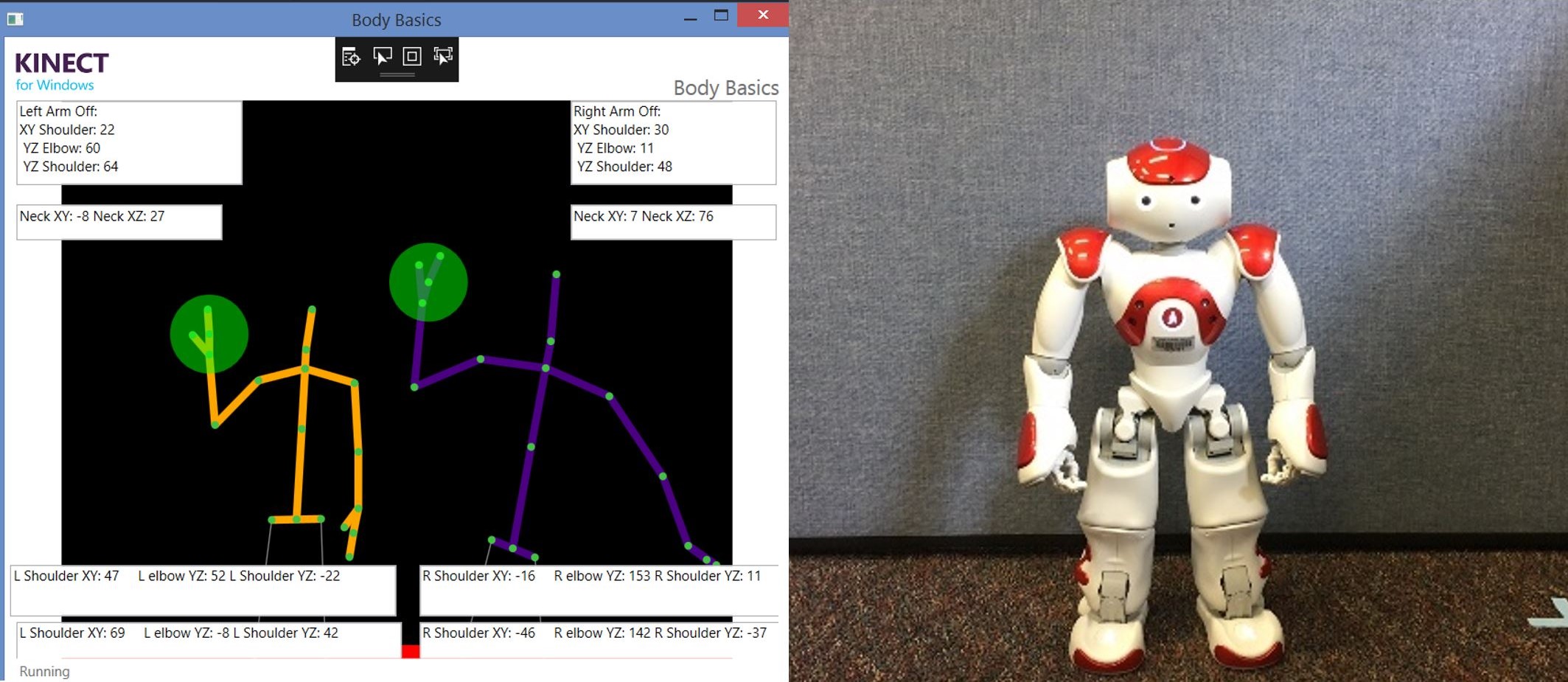
Imitating Human Movement in Androids using Kinect
Objective: To make an android imitate a human user's movements using an infra-red sensor.
Developed a C++ program based on the Microsoft Kinect Body Basics SDK that uses a Kinect infrared sensor and calculates
servo angles for the android to imitate the user’s movement and gestures, real-time.
It works by recognizing human joints and limbs, registering them as points and vectors in the Cartesian space, and
calculates the joint orientations relative to a body frame, and moves the android through serial communication.